Con-API’s Robotics Research
Advancing autonomous and collaborative robotic systems for construction site intelligence and automation.
Our Robotics research focuses on developing mobile, aerial, and collaborative robotic platforms capable of operating in dynamic construction environments. From autonomous navigation in cluttered indoor spaces to aerial inspections of infrastructure, our work integrates SLAM, multi-robot coordination, BIM integration, and task automation to enhance data collection, safety, and productivity. Our aim is to advance human-robot collaboration towards a future where robots can directly assist workers in construction activities.
Research themes:
- Autonomous mobile robot navigation in construction environments
- Multi-robot collaboration for data collection
- Aerial robotics for infrastructure inspection
- Visual SLAM and indoor localization
- BIM-driven robot task planning and coordination
Featured Representative Works
1. Tseng, P. Y., Lin, J. J., Chan, Y. C., & Chen, A. Y. (2022). Real-time indoor localization with visual SLAM for in-building emergency response. Automation in Construction, 140, 104319. (SCI) ❐
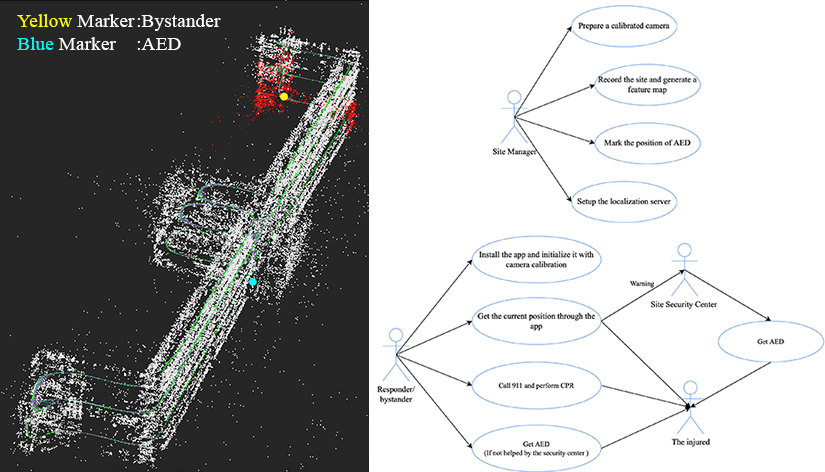
Borrowed from Figures 6 & 8; The deployment of the Localization Framework and the Tasks/Responsibilities required of the stakeholders for the framework.
The authors present a cost-effective indoor localization system for fast and reliable deployment in emergency response scenarios for indoor settings. The system is built on the visual Simultaneous Localization and Mapping (vSLAM) foundation which has high accuracy for low device requirement cost, enabling rapid deployment in unpredictable environments. The main target function of the system is to facilitate indoor localization of Out-of-Hospital Cardiac Arrest (OHCA) patients.
Key contributions are the investigation of optimal thresholds for key feature extraction per image frame and analysis on how much image data is required for reliable localization. The paper also addresses common challenges such as matching errors under varying lighting conditions, proposing an enhanced vSLAM pipeline to maintain robustness.
Real building tests shows a 94% average localization success rate, demonstrating the proposed system’s potential for autonomous navigation, situational awareness, and robot-assisted emergency interventions in indoor environments.
2. R. Hogan, W.-Y. Hsu, J. J. Lin and C.-J. Liang (2025). BIM-Driven Unmanned Ground Vehicle Swarm System for Geometric and Visual Data Collection. Journal of Computing in Civil Engineering, 39(5), 04025063. (ASCE) ❐
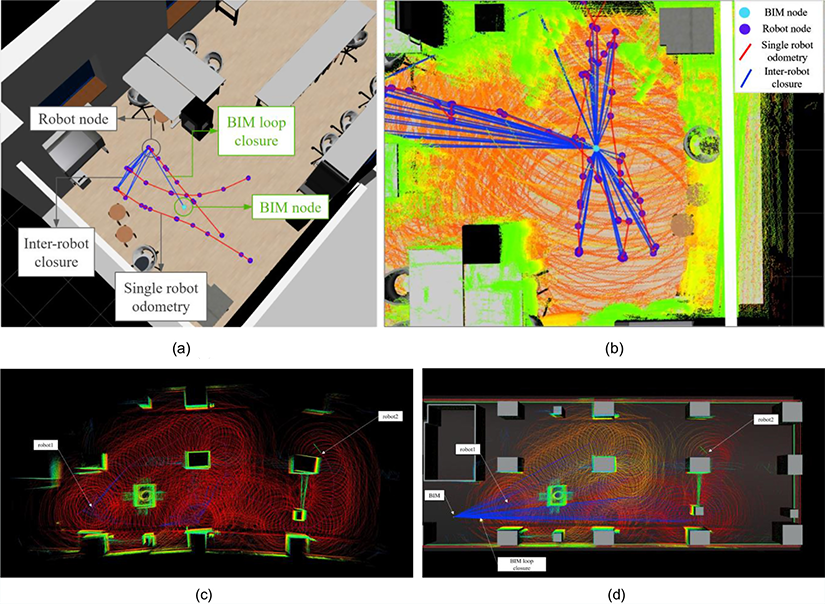
A combination of Figures 6 & 11: (a) an example of the proposed multirobot pose graph generation; (b) detected BIM loop closure edges which closes the virtual and real domains; (c) Two robots simultaneously executing SLAM without BIM loop closure; and (d) Two robots simultaneously executing SLAM with BIM loop closure.
This paper introduces a BIM-integrated swarm robotics framework for automated construction site data collection. The research gap tacked is the deployment of multiple small, coordinated unmanned ground vehicles (UGVs) for improved site coverage as opposed to the traditional single large-unmanned ground vehicle.
At the core is a swarm SLAM architecture built on the LAMP framework which enables each UGV to seamlessly share mapping data in real time. A BIM-driven back-end process augments loop closure detection between robots and introduces geometry-based constraints from the BIM model, enhancing the accuracy of the generated point clouds.
Two modified robots, a Clearpath Jackal and DJI Robomaster traverses an indoor floor and successfully maps the 3D environment as a point cloud. The novel setup shows an improved point cloud accuracy by 15% and reduced data capture time by 35% compared to a “single robot without BIM” setup. This work demonstrates how robot swarms and BIM-based intelligence can significantly improve the efficiency, safety, and quality of construction site surveying.
Conference Highlights
Lin, J.J., Ibrahim, A., Sarwade, S., Golparvar-Fard, M., Nitta, Y., Moirkawa, H. and Fukuchi, Y. (2020). Bridge Inspection with Aerial Robots and Computer Vision: A Japanese National Initiative. In ISARC. Proceedings of the International Symposium on Automation and Robotics in Construction (Vol. 37, pp. 1598-1605). IAARC Publications.
Lin, T. and Lin, J. J. (2022). “Construction task execution guide leveraging 3D-Rich semantic map and mixed reality,” Proceedings of the 26th Symposium on Construction Engineering and Management, July 22, 2022, Taoyuan, Taiwan.
Project Involvement within this field
地面群集機器人協作系統應用於營建室內空間資料蒐集
Ground cluster robot collaborative system is used for building indoor space data collection.
2023.Aug – 2024.Aug. PI
Sponsor: National Science and Technology Council (NSTC)